


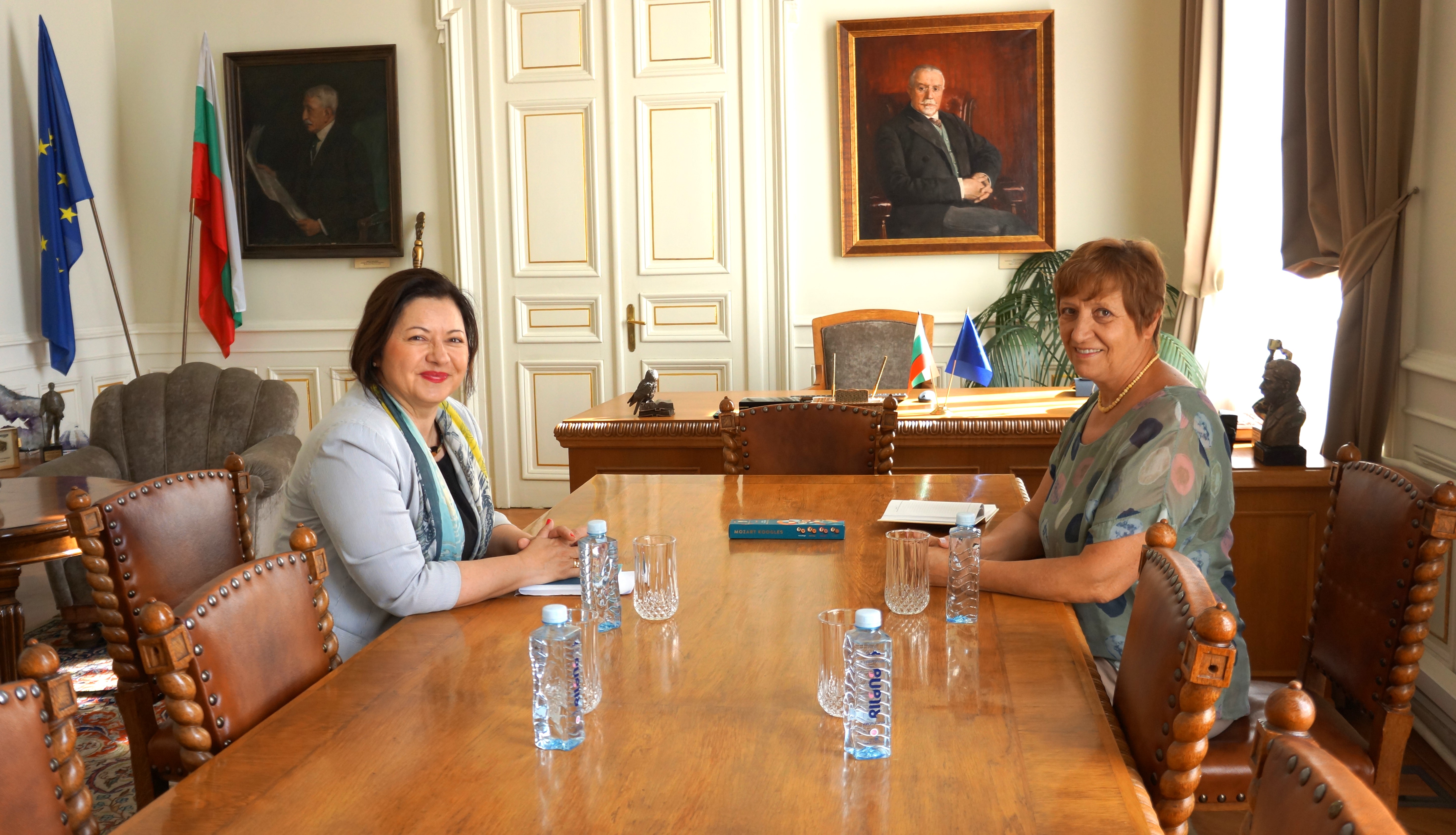

Среща на председателя на БАН с посланика на България в Хърватия
Председателят на БАН чл.-кор. Евелина Славчева прие днес в Академията посланика на България в Хърватия Н. Пр. Ива Крулева. На срещата присъстваха проф. дн Емануел Мутафов, заместник-председател на БАН, и проф. д-р Нели Косева, главен [...]

Лятна школа по славянска палеография
Третото издание на лятната школа по славянска палеография „Кирило-Методиевско наследство: Кирилицата в средновековните южнославянски земи“ беше открито на 27 юли. Кирило-Методиевският научен център при Българската академия на науките организира школата, която ще се проведе до [...]

Националният природонаучен музей гостува на Централни хали
Малко известни факти за животни, които доказват теорията за еволюцията на Дарвин, разказа д-р Светлозара Казанджиева от Националния природонаучен музей на БАН в първата от поредица научнопопулярни лекции, които се провеждат от днес до [...]
Учени от БАН участват в Международния конгрес на математиците
От 23 до 30 юли 2027 г. във Филаделфия, САЩ, се провежда Международният конгрес на математиците (International Congress of Mathematicians – ICM) – най-значимото и мащабно събитие в света на математическите науки. Българската математическа общност [...]
Среща на председателя на БАН с посланика на България в Словакия
Съвместни инициативи обсъдиха председателят на БАН чл.-кор. Евелина Славчева и посланикът на България в Словакия Н.Пр. Снежана Йовева по време на работна среща, която се проведе в Българската академия на науките днес. Председателят на Словашката [...]

Евразийска конференция за тревните екосистеми събира водещи учени в София
Институтът по биоразнообразие и екосистемни изследвания на Българската академия на науките е домакин на 21-вата Eurasian Grassland Conference, която се провежда в София от 19 до 23 юли 2026 г. Форумът, организиран от Eurasian Dry [...]
Видео материали
Видео материали
Живият дух на създателите (1h 27min)
Концерт 155 години БАН (1h 42min)
Международни новини
Международни новини

Пето издание на Симпозиума за научни изследвания на френски език Букурещ
Френското посолство в Румъния, в партньорство с регионалното ръководство на Университетската агенция на франкофонията (AUF) в сътрудничество с Академията за икономически изследвания (ASE), Посолството на Швейцария в Румъния и Посолството на Канада в Румъния, организират [...]
„По-важно от всякога“: EASAC отбелязва 25 години консултации по научната политика като мрежа от европейски национални академии на науките
Брюксел, 11 юни 2026 г. – Преди 25 години националните научни академии в Европа обединиха усилията си, за да гарантират, че научно обоснованите факти ще имат своето място при вземането на ключови решения от политиците [...]
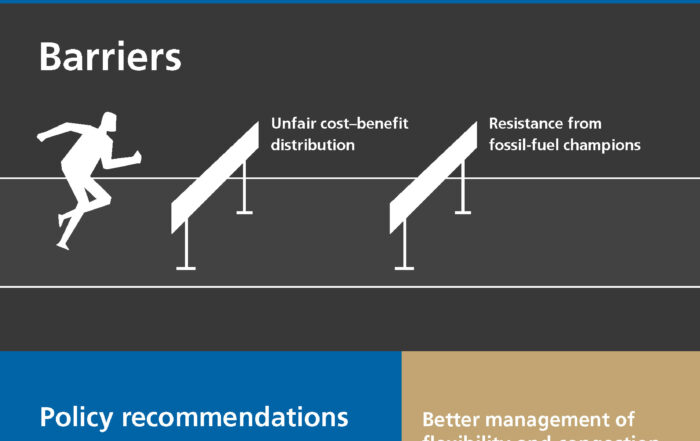
Европа е изправена пред най-голямата енергийна криза от един век насам
На фона на засилващите се дебати в Европа относно начините за смекчаване на въздействието от скока в цените на енергията, осигуряване на сигурността на доставките и възстановяване на достъпността и индустриалната конкурентоспособност, коментарът предлага актуална [...]
Нов коментар на EASAC: Възстановяването на природата е стратегическа инвестиция в сигурността, просперитета и екологичната стабилност на Европа
Европа е изправена пред нарастващи разходи за щети, свързани с климата, нарастващ натиск върху публичните финанси и подновени дебати относно конкурентоспособността и сигурността. Пълното прилагане на Регламента на ЕС за възстановяване на природата е стратегическа [...]

Наградата „Мадам дьо Стал“ за 2025 на ALLEA бе присъдена на председателя на Европейския съвет за научни изследвания (ERC) Мария Лептин
15 декември 2025 г. ALLEA с гордост съобщава, че Мария Лептин, председател на Европейския съвет за научни изследвания (ERC) и председател на управителния орган на ERC, Научния съвет, е удостоена с наградата „Мадам дьо Стал“ [...]

Академиите насърчават Европейската комисия да възприеме внимателен и етичен подход към изкуствения интелект в Европейското управление на кризи
Група от изтъкнати учени, номинирани от академичните мрежи на SAPEA - част от Механизма за научни консултации към Европейската комисия, представи днес доклад за ролята на изкуствения интелект в управлението на извънредни ситуации и кризи. [...]





